ICM-42688-P против BMI088 и BMI270: окончательное руководство по 6-осевым ИМУ
ICM-42688-P против BMI088 против BMI270: окончательное руководство по выбору 6-осевого ИМУ для контроллеров полёта и промышленной робототехники
Категория: Промышленные применения и решения | Автор: Клаус Фишер | Опубликовано: май 2026 г. | Последнее обновление: 15 мая 2026 г.
Ключевые выводы:
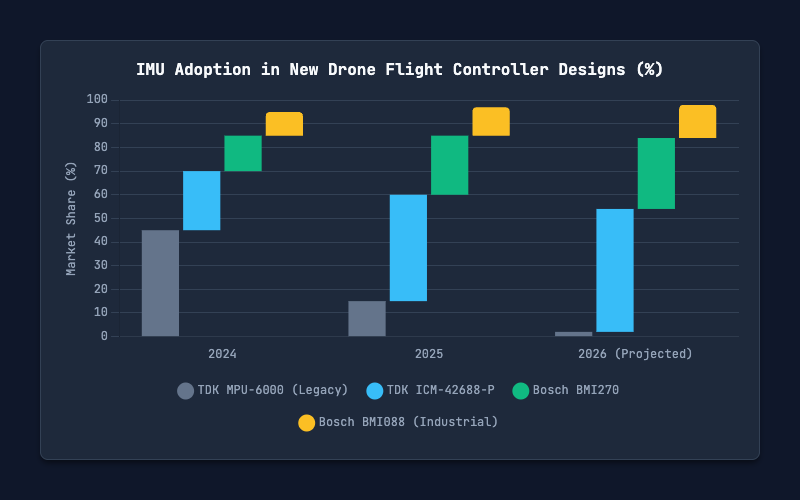
- Конец эпохи: прекращение производства легендарного датчика TDK MPU-6000 вынудило инженеров-разработчиков аппаратного обеспечения вступить в «Игру гироскопов», в результате чего промышленным стандартом стали датчики TDK ICM-42688-P и серия BMI от Bosch.
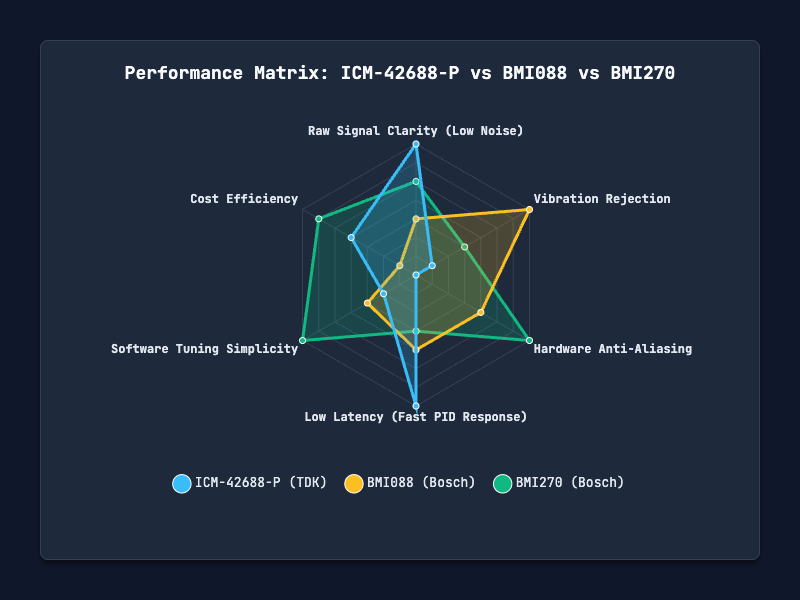
- Высокоточный скальпель: Датчик ICM-42688-P обладает рекордно низкой плотностью шума в отрасли (2,8 мдпс/√Гц), однако его минимальная аппаратная фильтрация требует безупречных источников питания LDO на 3,3 В и тщательной виброизоляции.
- Промышленный датчик: Датчик Bosch BMI088 использует архитектуру с двумя отдельными кристаллами (отдельные кристаллы акселерометра и гироскопа), обеспечивающую беспрецедентную устойчивость к вибрациям, что делает его стандартным выбором для тяжёлых коммерческих БПЛА и промышленных роботов, работающих в условиях высокой вибрации.
- Король фильтров: В датчике Bosch BMI270 реализованы мощные встроенные аппаратные низкочастотные антиалиасинговые фильтры. Хотя они вносят собственную задержку, они обеспечивают исключительно чистые данные, что значительно упрощает настройку контуров регулирования в Betaflight.
- Реальность программного обеспечения: Современное прошивочное обеспечение для полётов (Betaflight 4.3 и выше) адаптировано к этим датчикам, а это означает, что выбор аппаратного обеспечения теперь определяет вашу стратегию программной фильтрации.
- 📧 Отправить запрос на коммерческое предложение для 6-осевых ИМУ → — icallin поддерживает проверенные запасы датчиков движения TDK, Bosch и STMicroelectronics для немедленной отгрузки.
1. Введение — «Игра гироскопов»
На протяжении почти десяти лет инженеры-разработчики аппаратного обеспечения, проектирующие контроллеры полёта (FC) для дронов, стабилизаторов гимбалов и VR-шлемов, редко спорили о том, какой блок измерения инерционных параметров (IMU) следует использовать. MPU-6000 от TDK InvenSense был бесспорным лидером. Он отличался надёжностью, относительной устойчивостью к электрическим помехам и идеальным балансом аппаратной фильтрации и задержки для контуров управления PID (пропорционально-интегрально-дифференциального типа).
Однако MPU-6000 был изготовлен по устаревшему технологическому процессу на 8-дюймовых пластинах, который стал экономически невыгодным для производителя. Последовавшее объявление о снятии микросхемы с производства (EOL) спровоцировало то, что сообщества FPV (полёт от первого лица) и робототехники ласково назвали «Игрой гироскопов».
После свержения старого короля инженеры поспешили найти достойного преемника. На рынке быстро выделились три основных шестикоординатных MEMS-датчика (микроэлектромеханические системы): TDK InvenSense ICM-42688-P, Bosch Sensortec BMI088 и Bosch Sensortec BMI270.
Это не простое сравнение технических характеристик. Выбор одного из этих трёх датчиков принципиально изменяет аппаратную конструкцию вашего контроллера полёта и определяет, как именно вы должны настраивать программные фильтры. Неправильный выбор ИМУ для конкретной среды с вибрациями — или отсутствие соответствующей схемы питания для выбранного ИМУ — приведёт к наложению спектров датчиков, перегреву двигателей и катастрофической неустойчивости полёта.
В этом руководстве представлено исчерпывающее техническое сравнение трёх ведущих ИМУ с анализом их шумовых характеристик, аппаратных антиалиасинговых фильтров и практических последствий их производительности в условиях высокой вибрации.
2. TDK InvenSense ICM-42688-P — высокоточный скальпель
Если MPU-6000 — это надёжный грузовик, то TDK ICM-42688-P — это болид «Формулы-1». Его широко считают современным «золотым стандартом» для высокопроизводительных контроллеров полёта, однако для раскрытия его максимального потенциала требуется высокий инженерный уровень.
Архитектура и плотность шума
ICM-42688-P — это премиальное устройство слежения за движением с шестью степенями свободы, объединяющее 3-осевой гироскоп и 3-осевой акселерометр. Его отличительной особенностью является поразительно низкая плотность шума. Плотность шума гироскопа составляет всего 2,8 мдпс/√Гц (миллиградуса в секунду на квадратный корень из герца), а акселерометр достигает сверхнизкого значения 70 мкг/√Гц.
Эта экстремальная чувствительность означает, что датчик ICM-42688-P способен обнаруживать мельчайшие изменения угловой скорости и ускорения с невероятной точностью. Для пилотов дронов, выполняющих микрокоррекции на высоких скоростях, или для шлемов виртуальной реальности, требующих отслеживания положения головы без дрейфа, такая точность является бесценной.
Двуострый меч минимальной аппаратной фильтрации
В отличие от более старых датчиков, ICM-42688-P оснащён высококонфигурируемыми цифровыми фильтрами, однако по умолчанию не имеет агрессивной «встроенной» аппаратной низкочастотной фильтрации. Он выводит необработанные, неотфильтрованные данные с чрезвычайно высокой частотой дискретизации (до 32 кГц для гироскопа).
Это двусторонний меч. С одной стороны, минимальная аппаратная фильтрация означает минимальную задержку. Данные с датчиков поступают в PID-контур микроконтроллера почти мгновенно, что обеспечивает чрезвычайно «стабильные» характеристики полёта.
С отрицательной стороны, поскольку устройство не осуществляет агрессивную фильтрацию высокочастотных шумов на аппаратном уровне, оно без колебаний регистрирует каждую отдельную высокочастотную вибрацию, вызванную несбалансированными двигателями, погнутыми пропеллерами или резонансом рамы. Если такой высокочастотный шум попадает в программный ПИД-контур, возникает «наложение спектров» (алиасинг). Алиасинг возникает, когда высокочастотный шум маскируется под низкочастотное движение, заставляя контроллер полёта выдавать быстрые и ошибочные корректирующие сигналы двигателям, что приводит к перегреву двигателей и неконтролируемому улёту БПЛА.
Чувствительность источника питания
Чрезвычайная чувствительность датчика ICM-42688-P делает его крайне уязвимым к электрическим помехам. Ранние пользователи этого ИМУ обнаружили, что если шина питания 3,3 В на контроллере полёта была «грязной» (подвергалась пульсациям напряжения от ЭСУ), ИМУ выдавал некорректные данные. Проектирование печатной платы с использованием ICM-42688-P требует применения выделенного высококачественного стабилизатора напряжения с низким падением (LDO) и тщательного размещения развязывающих конденсаторов для обеспечения безупречной подачи питания.
Таблица 1: Ключевые технические характеристики ICM-42688-P
| Параметр | Спецификация | Последствия для проектирования аппаратного обеспечения |
|---|---|---|
| Плотность шума гироскопа | 2,8 мдпс/√Гц | Ультрачувствительный; точно фиксирует микродвижения. |
| Плотность шума ускорения | 70 мкг/√Гц | Отлично подходит для точной оценки ориентации. |
| Максимальная частота выходных данных (ODR) | 32 кГц (гироскоп), 32 кГц (акселерометр) | Сверхнизкая задержка; требует реализации быстрой шины SPI. |
| Аппаратная фильтрация | Минимальный стандартный низкочастотный фильтр | Требует агрессивной программной фильтрации (фильтров оборотов) в Betaflight. |
| Чувствительность к источнику питания | Очень высокая | Требуется выделенный малошумящий стабилизатор напряжения 3,3 В (LDO) на печатной плате. |
| Интерфейс | I3C, I2C, SPI | Универсальная интеграция с современными микроконтроллерами. |
Таблица 1: Технические параметры, определяющие рабочие характеристики датчика TDK ICM-42688-P. | Источник: технический паспорт TDK InvenSense | Подготовлено: icallin.com
3. Bosch BMI088 — промышленный трудяга
В то время как сообщество FPV уделяет большое внимание задержке, коммерческая индустрия дронов (во главе с такими компаниями, как DJI) и промышленный робототехнический сектор ставят во главу угла нечто совершенно иное: устойчивость к вибрациям. В этих приложениях доминирует Bosch BMI088.
Двухчиповая архитектура
BMI088 принципиально отличается от ICM-42688-P. В то время как большинство 6-осевых ИМУ интегрируют гироскоп и акселерометр на одном кремниевом кристалле, BMI088 по сути представляет собой два отдельных сенсорных кристалла, размещённых в одном корпусе.
Почему Bosch использует этот более сложный и дорогостоящий производственный процесс? Чтобы физически изолировать датчики друг от друга и от внешних механических нагрузок. Гироскоп в BMI088 основан на проверенной автомобильной технологии Bosch, тогда как акселерометр оптимизирован для работы в условиях высокой вибрации.
Непревзойденное подавление вибрации
Это физическое разделение в сочетании с чрезвычайно жёсткой внутренней структурой корпуса обеспечивает BMI088 беспрецедентную устойчивость к механическим ударам и резонансу рамы на высоких частотах. В тяжёлом сельскохозяйственном дроне или промышленной роботизированной руке вибрации являются сильными и непрерывными. Стандартный ИМУ (инерциальный измерительный блок) оказался бы перегруженным этим механическим шумом, что привело бы к ограничению показаний датчиков (когда амплитуда вибрации превышает диапазон измерений датчика).
BMI088 подавляет эти вибрации на физическом уровне ещё до того, как они достигнут стадии цифрового преобразования. Он выступает в роли акустического и механического амортизатора. Именно поэтому почти каждый современный дрон DJI — от серий Mavic до крупных корпоративных платформ Matrice — использует BMI088.
Компромиссы: размер, стоимость и сложность
Прочность BMI088 достигается за счёт определённых компромиссов. Во-первых, архитектура с двумя кристаллами делает её крупнее и значительно дороже по сравнению с IMU потребительского класса. Во-вторых, с точки зрения программной интеграции она ведёт себя как два отдельных датчика: требуются два отдельных вывода выбора чипа SPI (CS) и две независимые процедуры инициализации в прошивке, что усложняет разводку печатной платы контроллера полёта и программные драйверы.
Таблица 2: Ключевые технические характеристики BMI088
| Параметр | Спецификация | Последствия для проектирования аппаратного обеспечения |
|---|---|---|
| Архитектура | Двухкристальная (отдельные гироскоп и акселерометр) | Беспрецедентная изоляция от вибраций; больший физический размер. |
| Плотность шума гироскопа | 14 мдпс/√Гц | Выше, чем у TDK, но значительно снижена за счёт подавления вибраций. |
| Плотность шума ускорения | 160 мкг/√Гц | Оптимизировано для промышленных сред с высокими значениями ускорения. |
| Устойчивость к вибрациям | Лучший показатель в своём классе | Окончательный выбор для тяжёлых дронов и промышленной робототехники. |
| Аппаратный интерфейс | Требуется 2 сигнала выбора чипа SPI | Сложная трассировка печатной платы; занимает два вывода на микроконтроллере. |
Таблица 2: Технические параметры, определяющие рабочие характеристики датчика Bosch BMI088. | Источник: технический паспорт Bosch Sensortec | Составлено: icallin.com
4. Bosch BMI270 — Король фильтров «подключи и работай»
Для инженеров, ищущих компромисс между чрезвычайно чувствительным TDK ICM-42688-P и сложным, мощным Bosch BMI088, Bosch BMI270 стал чрезвычайно популярным выбором.
Встроенный аппаратный фильтр нижних частот
Определяющей характеристикой BMI270 является её подход к фильтрации. Bosch разработала BMI270 с чрезвычайно надёжными аппаратными низкочастотными антиалиасинговыми фильтрами, «встроенными» на уровне аппаратного обеспечения.
В контексте датчиков движения антиалиасный фильтр действует как непреодолимая преграда для высокочастотных шумов. Вместо того чтобы передавать каждую исходную микровибрацию на микроконтроллер, внутреннее аппаратное обеспечение BMI270 агрессивно сглаживает и фильтрует сигнал ещё до того, как он покидает датчик.
Упрощение программного обеспечения
Это фильтрация на аппаратном уровне кардинально меняет способ взаимодействия программного обеспечения, такого как Betaflight, с датчиком. Поскольку данные, выводимые BMI270, изначально чрезвычайно чисты, разработчикам аппаратных решений и пилотам не требуется так сильно полагаться на сложные программные фильтры (например, динамические режекторные фильтры D-составляющей).
Вы часто можете понизить уровень или полностью отключить несколько программных фильтрующих слоёв в прошивке контроллера полёта, освободив ресурсы микроконтроллера и значительно упростив процесс настройки. Для потребительской электроники и стандартных дронов датчик BMI270 обеспечивает «готовое к использованию» решение, при котором сенсор работает отлично сразу «из коробки», даже на механически шумных рамах.
Врождённый штраф за задержку
Законы обработки сигналов диктуют, что агрессивная фильтрация всегда вносит фазовую задержку (задержку по времени). Поскольку BMI270 выполняет внутри себя значительную работу по очистке сигнала, данные поступают в контур ПИД-регулирования немного позже, чем от необработанного, нефильтрованного датчика ICM-42688-P.
Для автономного дрона доставки или шлема виртуальной реальности эта микроскопическая задержка незначительна. Однако для элитных пилотов гоночных квадрокоптеров в режиме первого лица (FPV), которые полагаются на реакцию на уровне миллисекунд, чтобы преодолевать узкие препятствия со скоростью 100 миль в час, эта небольшая фазовая задержка может заставить квадрокоптер ощущаться немного «мягче» или менее полностью «заблокированным» по сравнению с датчиком TDK.
Таблица 3: Ключевые технические характеристики BMI270
| Параметр | Спецификация | Последствия для проектирования аппаратного обеспечения |
|---|---|---|
| Фильтрация на аппаратном уровне | Агрессивная внутренняя антиалиасинговая обработка | Обеспечивает исключительно чистые данные сразу «из коробки». |
| Влияние программного обеспечения | Снижает нагрузку на микроконтроллер | Позволяет отключать некоторые программные фильтры нижних частот. |
| Задержка фазы / задержка | Выше, чем у ICM-42688-P | Компромисс ради чистого сигнала; заметна только элитным пилотам. |
| Шум гироскопа | 8 мдпс/√Гц | Сбалансированный компромисс между TDK и BMI088. |
| Интеграция | Умный FIFO и прерывания | Отлично подходит для носимых технологий и потребительской электроники. |
Таблица 3: Технические параметры, определяющие рабочие характеристики Bosch BMI270. | Источник: технический паспорт Bosch Sensortec | Составлено: icallin.com
5. Интеграция Betaflight и прошивки — программная реальность
Технические характеристики этих БИМС раскрывают лишь половину картины. Истинные показатели производительности определяются тем, как современное программное обеспечение систем управления полётом — в частности, Betaflight, ArduPilot и INAV — взаимодействует с аппаратным обеспечением.
На ранних этапах разработки «Игры гироскопов» резкий переход с MPU-6000 вызвал массу проблем. Прошивка была оптимизирована под специфический профиль шумов MPU-6000. Установка ICM-42688-P или BMI270 в старую сборку прошивки приводила к катастрофическому ухудшению полётных характеристик, поскольку программные фильтры PID-регулятора противодействовали новым аппаратным реалиям.
Роль динамических фильтров с вырезом
Чтобы по-настоящему понять, почему переход от MPU-6000 к ICM-42688-P вызвал столь радикальный сдвиг парадигмы, необходимо изучить принцип работы динамических режекторных фильтров в современном прошивочном обеспечении для полётов. Режекторный фильтр предназначен для подавления очень узкой, конкретной полосы частот («режекции») с сильным ослаблением сигнала в этой полосе, при этом все остальные частоты проходят без изменений.
В эпоху MPU-6000 статические режекторные фильтры зачастую были достаточны, поскольку само аппаратное обеспечение сглаживало наиболее резкие высокочастотные всплески. Однако необработанные данные, поступающие от ICM-42688-P, настолько слабо отфильтрованы, что шум, обусловленный оборотами двигателей, постоянно смещается вверх и вниз по частотному спектру при ускорении и замедлении дрона. Именно здесь стал обязательным двунаправленный протокол DSHOT в Betaflight. Считывая точные данные телеметрии оборотов с электронных регуляторов скорости (ESC) в реальном времени, контроллер полёта динамически перемещает программные режекторные фильтры, чтобы идеально отслеживать и устранять шум двигателей до того, как он попадёт в контур ПИД-регулирования. Это требует значительных вычислительных ресурсов микроконтроллера (часто требуя процессоры серии F7 или H7), однако результатом является уровень точности полёта, недостижимый для более старых ИМУ.
Механические императивы мягкого крепления
Программная фильтрация способна достичь лишь определённых пределов. Если частота резонанса рамы идеально совпадает с резонансной частотой MEMS-структуры внутри корпуса ИМУ, физический чувствительный элемент достигнет своих механических упоров, что приведёт к «ограничению сигнала» (clipping). При ограничении ИМУ выдаёт максимальные значения независимо от реального движения, полностью ослепляя контроллер полёта. Для чрезвычайно чувствительных датчиков, таких как ICM-42688-P, установка виброгасящих резиновых втулок высокого качества под стеком контроллера полёта — не просто рекомендация, а строгое инженерное требование, направленное на предотвращение катастрофических отказов в полёте.
Революция Betaflight 4.3+
Выпуск Betaflight 4.3 (и последующие обновления 4.4/4.5) кардинально изменил эту динамику. Разработчики внедрили высокоэффективные динамические режекторные фильтры и профили настройки на основе ползунков, специально адаптированные под уникальные характеристики датчиков TDK и Bosch.
- Для датчика ICM-42688-P: поскольку Betaflight знает, что этот датчик выдаёт «сырые», неотфильтрованные данные, он в значительной степени полагается на фильтр RPM (с использованием телеметрии ЭСУ) и динамические режекторные фильтры для программного подавления шумов двигателей до того, как сигнал поступит в ПИД-регулятор. Конструктор аппаратного обеспечения обязан обеспечить механическое мягкое крепление (с использованием силиконовых втулок) и безупречное питание 3,3 В, однако остальное берёт на себя программное обеспечение.
- Для BMI270: Betaflight распознаёт встроенную аппаратную фильтрацию чипа Bosch. Современные предустановки настройки автоматически снижают значения программных низкочастотных фильтров, чтобы избежать увеличения задержки. Программное обеспечение по сути отступает и позволяет аппаратной части Bosch выполнять свою работу.
Таблица 4: Профили настройки Betaflight (ICM против BMI)
| Датчик IMU | Аппаратная фильтрация | Стратегия программной фильтрации в Betaflight | Профиль задержки |
|---|---|---|---|
| ICM-42688-P | Очень низкий | Требуется агрессивная программная динамическая полосовая фильтрация и фильтрация по частоте вращения (RPM). | Сверхнизкий (идеально подходит для гонок) |
| BMI270 | Высокий (встроенный) | Снизьте программные фильтры нижних частот, чтобы избежать накопления задержки. | Умеренный (идеален для фристайла/кинематографичной съемки) |
| BMI088 | Умеренный (изолированный) | Стандартная фильтрация; сильно зависит от жёсткости механической рамы. | Умеренный (идеально подходит для тяжёлых грузов/промышленного применения) |
Таблица 4: Общие стратегии фильтрации программного обеспечения на основе аппаратной архитектуры IMU. | Источник: Документация по разработке Betaflight | Составлено: icallin.com
6. Устаревшие и альтернативные варианты
Хотя основное внимание уделяется тройке лидеров, крайне важно понимать более широкий контекст рынка ИМУ, включая унаследованные датчики и появляющиеся промышленные альтернативы.
Наследие TDK MPU-6000 Датчик TDK MPU-6000 на протяжении многих лет оставался бесспорным лидером, поскольку случайно обладал идеальным сочетанием устойчивости к шуму и низкой задержки для ранних полётных контроллеров на базе 8- и 32-битных микроконтроллеров. Однако он устарел. Разработка нового изделия на основе MPU-6000 в 2026 году является инженерной ошибкой: вам придётся приобретать стареющие, завышенные в цене компоненты через посредников без какой-либо поддержки со стороны производителя. ICM-42688-P — его прямой, современный преемник.
Альтернатива промышленному машинному обучению Для приложений, выходящих за рамки стандартных контроллеров полета, таких как прогнозное техническое обслуживание, сложная промышленная робототехника или носимые технологии, разработчики зачастую обращаются за пределы экосистемы FPV. STMicroelectronics ISM330DHCX представляет собой мощную альтернативу промышленного класса.
Хотя у него нет столь масштабной поддержки со стороны сообщества Betaflight, как у TDK или Bosch, датчик ISM330DHCX оснащён уникальным «ядром машинного обучения» (MLC). Это позволяет самому датчику выполнять деревья решений и распознавать сложные паттерны движения (например, определять столкновение роботизированной руки с объектом), не пробуждая основной микроконтроллер и тем самым значительно экономя энергию.
Таблица 5: Сравнение характеристик с альтернативными ИМУ (MPU-6000, ISM330DHCX)
| Особенность | TDK MPU-6000 (снята с производства) | STMicro ISM330DHCX |
|---|---|---|
| Целевой рынок | Устаревшие дроны / Потребительские устройства | Тяжёлая промышленность / Робототехника |
| Особые функции | Беспрецедентная историческая надежность | Встроенный ядро машинного обучения (MLC) |
| Статус | Прекращено (EOL) | Активно / Рекомендуется |
| Интерфейс | SPI / I2C | SPI / I2C / I3C |
Таблица 5: Контекстуализация унаследованных и промышленных альтернативных датчиков движения. | Источник: технические описания производителей | Составлено: icallin.com
7. Стратегия закупок и динамика цепочки поставок
Выбор наилучшего технического ИМУ не имеет значения, если вы не можете обеспечить выделение компонентов для серийного производства. Динамика цепочки поставок датчиков TDK и Bosch резко колеблется в зависимости от спроса со стороны смежных отраслей, таких как автомобильные системы ADAS (расширенные системы помощи водителю) и потребительские VR-гарнитуры.
Сроки выполнения и рыночные реалии
По состоянию на второй квартал 2026 года уполномоченные дистрибьюторы сообщают о увеличенных сроках поставки для серии датчиков Bosch BMI. Из-за широкого применения BMI088 в коммерческих беспилотных летательных аппаратах и автомобильных системах заводские квоты на него часто растягиваются до 26 и более недель.
Модель TDK ICM-42688-P несколько легче доступна через официальные дистрибьюторские каналы, однако резкий всплеск производства шлемов виртуальной реальности может исчерпать мировые запасы за считанные дни.
Стратегическое снабжение с помощью icallin
Чтобы предотвратить остановку производственной линии, производителям оборудования необходимо сотрудничать с независимыми дистрибьюторами, которые поддерживают проверенные физические буферные запасы за пределами системы распределения OEM. Компания icallin поддерживает стратегические резервы датчиков ICM-42688-P, BMI088 и BMI270, все из которых прошли строгую проверку в соответствии с протоколами инспекции, соответствующими стандарту AS6081, что гарантирует их подлинность.
Таблица 6: Матрица доступности цепочки поставок (второй квартал 2026 г.)
| Модель IMU | Основной конечный рынок спроса | Авторизованное время выполнения заказа | Проверенный буферный запас icallin |
|---|---|---|---|
| ICM-42688-P | VR/AR, потребительские дроны | 16–24 недели | ✅ Немедленная отправка |
| BMI088 | Промышленные/коммерческие дроны | 26–40 недель | ✅ Немедленная отправка |
| BMI270 | Носимые устройства, FPV-дроны | 18–26 недель | ✅ Немедленная отправка |
Таблица 6: Текущая рыночная доступность флагманских 6-осевых ИМУ. | Источник: icallin Market Intelligence | Составлено: icallin.com
Часто задаваемые вопросы
Вопрос 1: Почему MPU-6000 был снят с производства и кто является его настоящим преемником?
MPU-6000 от TDK производился по более старой и менее эффективной технологии кремниевых пластин диаметром 8 дюймов, которая утратила экономическую целесообразность для массового производства. Официально TDK позиционирует ICM-42688-P как своё современное высокопроизводительное преемственное решение, обеспечивающее значительно более низкую плотность шума и более высокие скорости передачи данных, хотя и требующее более тщательной интеграции источника питания.
В2: Требуется ли для ICM-42688-P выделенный LDO-источник питания?
Да. Из-за минимальной аппаратной фильтрации и чрезвычайной чувствительности датчик ICM-42688-P крайне подвержен электрическим помехам на шине 3,3 В. Разработчикам аппаратного обеспечения необходимо использовать специализированный малошумящий стабилизатор напряжения с низким падением (LDO), выделенный исключительно для IMU, чтобы предотвратить появление ложных сигналов в датчике из-за электрических помех от регуляторов скорости двигателя (ESC).
Вопрос 3: Почему некоторые пилоты сообщают о большем количестве проблем с управлением при «воздушном потоке винта» при использовании датчика BMI270?
Датчик Bosch BMI270 использует мощные внутренние аппаратные фильтры нижних частот. Хотя это обеспечивает исключительно чистые данные, по сравнению с «сырыми» датчиками возникает небольшая фазовая задержка (задержка во времени). Если программные фильтры контроллера полёта (например, динамические режекторные фильтры) не будут соответствующим образом ослаблены для компенсации, суммарная задержка может привести к тому, что дрон будет казаться слегка вялым при восстановлении после турбулентного воздушного потока от винтов («propwash»).
Вопрос 4: Не является ли датчик BMI088 избыточным решением для стандартных FPV-дронов с диагональю 5 дюймов?
Для стандартного развлекательного FPV-дрона с диагональю 5 дюймов датчик BMI088, как правило, избыточен. Его двухчиповая архитектура делает его физически крупнее, тяжелее и дороже, а также требует двух отдельных выводов SPI CS, что усложняет разводку печатной платы. Его лучше оставить для кинематографических установок с высокой грузоподъёмностью, сельскохозяйственных дронов и промышленных роботов, где обязательно требуется исключительная устойчивость к вибрациям.
В5: Как аппаратные фильтры нижних частот в IMU Bosch влияют на PID-регуляторы Betaflight?
Аппаратные фильтры нижних частот удаляют высокочастотный шум до того, как данные поступят в микроконтроллер. Это означает, что цикл PID в Betaflight получает более гладкий сигнал, снижая риск перегрева моторов. Однако поскольку фильтрация выполняется на аппаратном уровне, пользователь не может её обойти. Настройка Betaflight для IMU Bosch направлена на снижение программной фильтрации, чтобы аппаратные фильтры выполняли основную работу без внесения избыточной задержки.
Вопрос 6: Можно ли использовать ИМУ ISM330DHCX от STMicroelectronics в качестве прямой замены ИМУ от TDK?
Нет. Датчик ISM330DHCX от STMicroelectronics имеет совершенно другой физический корпус, распиновку и карту регистров по сравнению с датчиками TDK и Bosch. Переход на ISM330DHCX требует полного перепроектирования печатной платы и интеграции совершенно нового программного драйвера. Однако встроенный модуль машинного обучения делает его чрезвычайно привлекательным для новых промышленных решений.
Заключение
«Игра гироскопов» завершена, и победителя нет — только высокоспециализированные инструменты для решения конкретных инженерных задач.
Если вы разрабатываете высокопроизводительную систему, в которой задержка — главный враг, и у вас есть инженерные возможности для проектирования безупречных источников питания и печатных плат с виброизоляцией, то TDK ICM-42688-P — это непревзойдённый хирургический инструмент.
Если ваше приложение требует простоты подключения и использования «из коробки» и невероятно чистых данных «из коробки», встроенные аппаратные фильтры Bosch BMI270 позволяют легко настраивать программное обеспечение. А если вы разрабатываете промышленный резервуар, который должен выдерживать экстремальные и постоянные вибрации, двухкристалльный датчик Bosch BMI088 остаётся непревзойдённым.
Независимо от выбранной вами архитектуры, обеспечение безопасности компонентов является последним препятствием. Не позволяйте франчайзинговым срокам поставки, составляющим 40 недель, диктовать ваш график производства.
📧 Отправить запрос на коммерческое предложение для 6-осевых ИМУ →
Связанные внутренние ресурсы
- TDK ICM-42688-P — Подробные сведения о продукте
- Bosch BMI088 — Подробные сведения о продукте
- Bosch BMI270 — Подробные сведения о продукте
- Страница производителя Bosch
- Категория датчиков
- Отправить запрос на коммерческое предложение
- Популярные товары
Клаус Фишер — старший директор по техническому снабжению в компании icallin.com, специализирующийся на промышленной автоматизации, архитектурах цифровой обработки сигналов (DSP) и цепочке поставок компонентов для силовой электроники. Имея опыт проектирования тяжёлого промышленного оборудования, Клаус выступает связующим звеном между требованиями к аппаратному инжинирингу и глобальными стратегиями закупок на открытом рынке.

Топ рекомендуемых компонентов